Soluções inteligentes em mapeamento e robótica
Mapeamento e Robótica para ambientes onde humanos não devem entrar.
Soluções inteligentes em
mapeamento e robótica
A MIRA desenvolve tecnologia nacional de ponta para inspeção e mapeamento de espaços confinados — cavernas, dutos, galerias de barragens e áreas de risco humano fatal — com hardware LiDAR, processamento na nuvem e robôs autônomos.
Mais de 20 anos de experiência em robótica e inspeção industrial, com origem na UFMG e parcerias com Vale, ITV e Petrobras.
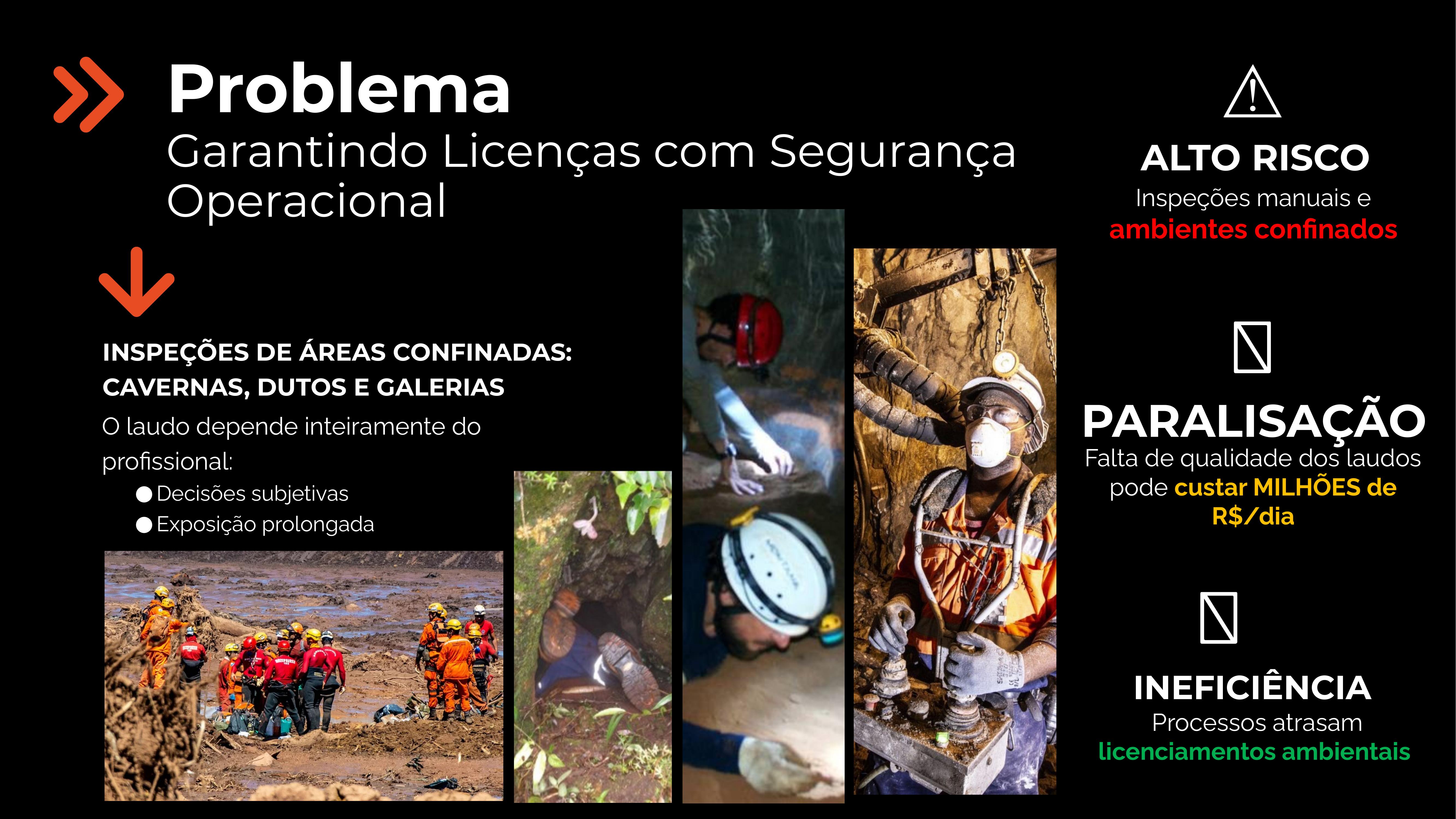
Inspeção de espaços confinados é cara, lenta e perigosa
Cavernas, dutos e galerias de barragens precisam ser mapeados — mas dependem de inspeções manuais arriscadas e laudos subjetivos.
Mais de 22 mil cavernas catalogadas
O Decreto 6.640 e a IN 02/2017 exigem mapeamento preciso para o licenciamento de operações de mineração no Brasil.
912 (SIGBM) e 471 (PNSB) barragens
A Lei nº 12.334/2010 (alterada pela Lei nº 14.066/2020) exige Plano de Segurança da Barragem com mapeamento geológico-geotécnico de fundações e galerias internas.
Alto risco humano
Inspeções manuais expõem profissionais a ambientes confinados, com risco de queda, soterramento e contaminação.
Paralisação operacional
A baixa qualidade dos laudos pode custar milhões de reais por dia em paralisações de operação.
Decisões subjetivas
O laudo depende inteiramente do profissional em campo, sem dados quantitativos rastreáveis e auditáveis.
Processos lentos
Procedimentos manuais atrasam licenciamentos ambientais e renovações de operação, gerando passivos legais.
Sistema nacional e tecnologia in-house — independência tecnológica para demandas específicas, da mão à autonomia total.

Trena 2D Inteligente
Hardware LiDAR de alta precisão para mapeamento instantâneo. Operação simples, apenas apontar e medir, com geolocalização integrada e armazenamento local.

Mapeamento SLAM 3D + MIRA Cloud
Processamento automático de dados e geração de relatórios georreferenciados direto na nuvem. Ideal para frotas e equipes que precisam de auditoria contínua.

Inspeções Avançadas com Robôs
Unidades autônomas de inspeção em áreas de risco humano fatal — cavernas, dutos e galerias de barragens. Operação on-demand, com laudos e dados auditáveis.

Onde a MIRA atua
Casos de uso reais em mineração, óleo & gás, agricultura e construção civil.
Topografia de Cavernas
Levantamento espeleométrico de alta precisão para licenciamento ambiental em áreas de mineração — mais de 6.000 cavernas em áreas da Vale.
Galerias de Barragens
Mapeamento geológico-geotécnico de galerias internas para o Plano de Segurança da Barragem (PSB) em conformidade com a Lei 12.334/2010.
Drenos de Ferrovias
Inspeção remota de drenos e dutos ao longo de malhas ferroviárias — mais de 1.300 pontos em apenas uma operadora.
Óleo & Gás
Pilotos com a Petrobras para inspeção robótica em ambientes confinados, herdeiros do projeto EspeleoRobô e da plataforma Espeleometria do ITV.
Mineração
Conformidade legal para licenciamento e renovação de operações em todo o Brasil — foco em Minas Gerais, Pará, Bahia e Espírito Santo.
MIRA Cloud
Plataforma SaaS proprietária para processamento de nuvens de pontos, geração de relatórios e auditoria de inspeções, com tecnologia 100% nacional.
Sócios fundadores
Mais de 20 anos de experiência em robótica e inspeção, com mais de R$ 15 milhões em projetos de P&D nos últimos 8 anos — Vale, Instituto Tecnológico Vale (ITV) e Petrobras.

Gilmar Cruz Jr
CEO
Doutorando UFMG. Pesquisador residente no CENPES/Petrobras, com foco em inspeções industriais.

Héctor Azpúrua
COO
Professor DCC-UFMG. Ex-Machine Learning Engineer na Meta (Facebook), pesquisador ITV e Komatsu.

Gustavo Freitas
CFO
Professor DEE-UFMG. Doutorado sanduíche na Carnegie Mellon. Diretor Financeiro da SBRobótica.

Paulo Rezeck
CTO
Professor DCC-UFMG. Especialista em Visão Computacional, SLAM e Robótica Inteligente.
André Luiz Cid
CMO
Doutorando UFMG. Pesquisador do ITV Vale, especialista em mapeamento robótico para mineração.